MICROPROCESADOR
Sus usos pueden ser muy variados ya que son unos elementos muy fáciles de programar para todo usuario.
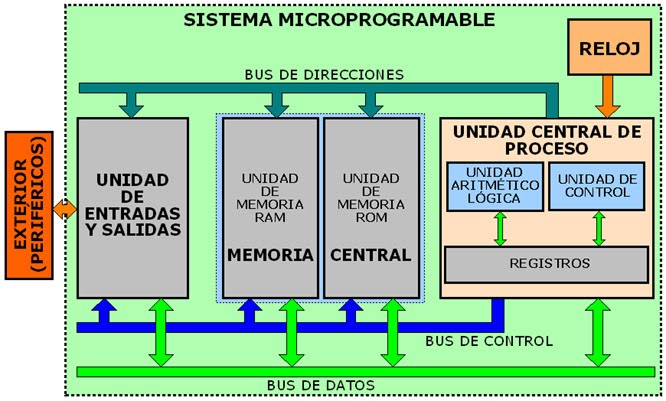
ARQUITECTURA DE UN MICROPROCESADOR
COMPONENTES INTERNOS
La estructura de un microprocesador se divide en dos partes.
Una para procesamiento, y otra para control.
Una para procesamiento, y otra para control.
En las que se encuentran:

La unidad aritmética y lógica ( ALU ).
La unidad de tiempo y control.
El controlador.
El registro.
El acumulador.
El decodificador.
Los buses internos.
La unidad de tiempo y control.
El controlador.
El registro.
El acumulador.
El decodificador.
Los buses internos.
La unidad aritmética y lógica ( ALU ).
La ( ALU ) es la parte que ejecuta todos los cálculos numéricos y lógicos durante la operación del procesador.

La unidad de control
Su objetivo es mantener la secuencia adecuada y el control de todas las operaciones del ( CPU ), y responde a todas las señales externas.El controlador
Decodifica las instrucciones de maquina y genera señales que dirigen la parte procesada del microprocesador.
El registro
Tiene por misión almacenar el codigo de operación de la instrucción leida desde la memoria, este codigo es decodificado y con esta información se logran todos los micro-pasos.
COMPONENTES EXTERNOS

Bus de direcciones.
Bus de datos.
Lineas Vcc y GND.
Bus de control.
MARCAS Y GENERACIONES



Esta marca dominaba en tercer lugar las ventas, pero actualmente se ha quedado muy relegada por la popularidad que adquirió AMD®; así que fue absorbida por la empresa Via Technologies®. Actualmente hay una línea moderna de productos de esta marca que poco a poco se intenta colocar en el mercado de las Desktop y de las Netbook.
3.- Cyrix®:

EL MODELO
Ejemplo de ello:
+ Modelo austero: Microprocesador AMD® Sempron, modelo LE-1250, velocidad de 2.2 GHz, memoria caché de 512 Kb, para Socket 940 AM2. (Agosto de 2008)
+ Modelo completo: Microprocesador AMD® Phenom, modelo 9850 X4, velocidad de 2.5 GHz, memoria caché de 4 Mb L2 y L3, para socket AM2. (Agosto de 2008)
2.- Para la marca Intel®:Los modelos completos son Pentium y las versiones austeras son Celeron.
Ejemplo de ello: Modelo austero: Microprocesador Intel® Celeron D, modelo Dual Core, velocidad de 1.6 GHz, memoria caché de 512 Kb, FSB de 800 MHz, para Socket 775. (Agosto de 2008) Modelo completo: Microprocesador Intel® Pentium 4, modelo E 6750, velocidad de 2.66 GHz, memoria caché de 4 Mb, FSB de 1333 MHz, para socket 775. (Agosto de 2008)

VELOCIDAD DEL RELOJ Y BUS
ENCAPSULADO DE UN MICROPROCESADOR
.jpg) El pin grid array o PGA es un tipo de empaquetado usado para los circuitos integrados, particularmente microprocesadores. Originalmente el PGA, el zócalo clásico para la inserción en una placa base de un microprocesador, fue usado para procesadores como el Intel 80386 y el Intel 80486; consiste en un cuadrado de conectores en forma de agujero donde se insertan los pines del chip por medio de presión. Según el chip, tiene más o menos agujeros (uno por cada patilla).
El pin grid array o PGA es un tipo de empaquetado usado para los circuitos integrados, particularmente microprocesadores. Originalmente el PGA, el zócalo clásico para la inserción en una placa base de un microprocesador, fue usado para procesadores como el Intel 80386 y el Intel 80486; consiste en un cuadrado de conectores en forma de agujero donde se insertan los pines del chip por medio de presión. Según el chip, tiene más o menos agujeros (uno por cada patilla).
QFP (Quad Flat Package).
 Un encapsulado Quad Flat Package (QFP o encapsulado cuadrado plano) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. QFP utiliza habitualmente de 44 a 200 pines, con una separación entre ellos de 0,4 a 1 mm. Esto es una mejora respecto del encapsulado Small-Outline Integrated Circuit (SOP o SOIC) pues permite una mayor densidad de pines y utiliza las cuatro caras del chip (en lugar de solo dos). Para un número de pines mayor se utiliza la técnica Ball grid array (BGA) que permite usar toda la superficie inferior.
Un encapsulado Quad Flat Package (QFP o encapsulado cuadrado plano) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. QFP utiliza habitualmente de 44 a 200 pines, con una separación entre ellos de 0,4 a 1 mm. Esto es una mejora respecto del encapsulado Small-Outline Integrated Circuit (SOP o SOIC) pues permite una mayor densidad de pines y utiliza las cuatro caras del chip (en lugar de solo dos). Para un número de pines mayor se utiliza la técnica Ball grid array (BGA) que permite usar toda la superficie inferior.
LQFP (Low-profile Quad Flat Package).
 Un encapsulado Low-profile Quad Flat Package (LQFP o encapsulado cuadrado plano de perfil bajo) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. El espacio entre pines puede variar; los intervalos más comunes son 0.4, 0.5, 0.65 y 0.80 mm.
Un encapsulado Low-profile Quad Flat Package (LQFP o encapsulado cuadrado plano de perfil bajo) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. El espacio entre pines puede variar; los intervalos más comunes son 0.4, 0.5, 0.65 y 0.80 mm.
PLCC (Plastic Leaded Chip Carrier).
 Un Plastic Leaded Chip Carrier (PLCC), también llamado Quad-Flat-J-Leg Chipcarrier (QFJ) es un encapsulado de circuito integrado con un espaciado de pines de 1,27 mm (0,05 pulgadas). El número de pines oscila entre 20 y 84. Los encapsulados PLCC pueden ser cuadrados o rectangulares. El ancho oscila entre 0,35 y 1,15 pulgadas. PLCC es un estándar JEDEC. Las configuraciones PLCC requieren menos espacio en placa que sus competidores los leadless chip carrier (similares a los encapsulados DIP pero con bolitas en lugar de pines en cada conector).
Un Plastic Leaded Chip Carrier (PLCC), también llamado Quad-Flat-J-Leg Chipcarrier (QFJ) es un encapsulado de circuito integrado con un espaciado de pines de 1,27 mm (0,05 pulgadas). El número de pines oscila entre 20 y 84. Los encapsulados PLCC pueden ser cuadrados o rectangulares. El ancho oscila entre 0,35 y 1,15 pulgadas. PLCC es un estándar JEDEC. Las configuraciones PLCC requieren menos espacio en placa que sus competidores los leadless chip carrier (similares a los encapsulados DIP pero con bolitas en lugar de pines en cada conector).
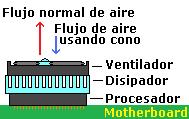
VENTILACION MICROPROCESADOR

Básicamente son dos maneras de ventilar el procesador:
1.- Consiste en que el ventilador dirija el aire directamente al disipador del procesador, esto siempre y cuándo el gabinete cuente con un cono de ventilación ó una ventila lateral.
2.- Se trata de que el ventilador expulse el aire del disipador, esto cuándo se carezca de ventilación lateral.
Otras maneras que se utilizan también es por medio de Software especializado y por medios basados en agua.
Los buses
Son interconexiones internas llevando información de un lado a otro.
COMPONENTES EXTERNOS

Bus de direcciones.
Bus de datos.
Lineas Vcc y GND.
Bus de control.
Bus de direcciones
Estan formados por 16 líneas A0 hasta A15 y son líneas de salida.
Bus de datos
Estan formados por 8 lineas D0 hasta D7, estas líneas son de entrada y salida.
Alimentación
Requiere solamente de 2 líneas de alimentación 0 y 5 V, con un margen de 5%, y consume una corriente máxima de 200 mA.
Bus de control
Conjunto de líneas de entrada y otras de salida y se agrupan según su función en los siguientes bloques :
Lineas de inicialización reciben la orden de parada de todos sus registros internos recomenzando el arranque.
Líneas de interrupción son de líneas de entrada que le dan al microprocesador diferentes tipos de ordenes para que detenga de forma temporal la ejecución.Líneas de autorización son lineas de salida y recibe ordenes de diferentes bloques internos.
Lineas de solicitud con estas lineas el microprocesador y el resto de los bloques establecen un dialogo de impulsos electrónicos.
Lineas de reloj sirven para entregar al microprocesador y a otros bloques del sistema una o varias ordenes cuadradas.
MARCAS Y GENERACIONES

Al adquirir un microprocesador, este se ofrece con ciertas características que lo definen; entre ellas están las siguientes:
LA MARCA
Esta puede ser alguna de las 3 líderes:
1.- AMD®: Significa ("American Micro Devices"), que traducido significa micro dispositivos Americanos. Es una empresa integrada en el año de 1976, dedicada inicialmente a fabricar microprocesadores idénticos a los de la empresa Intel®, pero esta última patentó sus productos, por lo que AMD® comenzó a diseñar los propios con muy excelentes resultados.

2.- Intel®: Significa ("INT egrated EL ectronics"), que significa electrónicos integrados. Esta empresa se
forma en el año de 1968 en el Sillicon Valley de California en EUA.

3.- Cyrix®:

EL MODELO
Es la subdivisión de los microprocesadores. Los modelos regularmente se referirán a una versión completa del producto ó a otra mas austera. La austera se refiere a que contiene menor cantidad de memoria caché L2 integrada dentro del circuito, por lo que es mas lento en acceder a ciertos datos e instrucciones.
Podemos encontrar principalmente el modelo Athlon y Phenom, mientras que las versiones austeras son Duron y Sempron.Ejemplo de ello: Modelo austero: Microprocesador AMD® Sempron, modelo LE-1250, velocidad de 2.2 GHz, memoria caché de 512 Kb, para Socket 940 AM2. (Agosto de 2008) Modelo completo: Microprocesador AMD® Phenom, modelo 9850 X4, velocidad de 2.5 GHz, memoria caché de 4 Mb L2 y L3, para socket AM2. (Agosto de 2008)
1.- Para la marca AMD®: Podemos encontrar principalmente el modelo Athlon y Phenom, mientras que las versiones austeras son Duron y Sempron.
Ejemplo de ello:
+ Modelo austero: Microprocesador AMD® Sempron, modelo LE-1250, velocidad de 2.2 GHz, memoria caché de 512 Kb, para Socket 940 AM2. (Agosto de 2008)
+ Modelo completo: Microprocesador AMD® Phenom, modelo 9850 X4, velocidad de 2.5 GHz, memoria caché de 4 Mb L2 y L3, para socket AM2. (Agosto de 2008)
2.- Para la marca Intel®:Los modelos completos son Pentium y las versiones austeras son Celeron.
Ejemplo de ello: Modelo austero: Microprocesador Intel® Celeron D, modelo Dual Core, velocidad de 1.6 GHz, memoria caché de 512 Kb, FSB de 800 MHz, para Socket 775. (Agosto de 2008) Modelo completo: Microprocesador Intel® Pentium 4, modelo E 6750, velocidad de 2.66 GHz, memoria caché de 4 Mb, FSB de 1333 MHz, para socket 775. (Agosto de 2008)

VELOCIDAD DEL RELOJ Y BUS
LA VELOCIDAD DEL BUS: Es la velocidad máxima con la que se transfieren los datos procesados en el microprocesador hacia otros periféricos como la memoria.
LA VELOCIDAD DELRELOJ: Se refiere a la velocidad del microprocesador. Por ejemplo, para procesar una instrucción, por decir algo, una multiplicación, digamos que ese microprocesador requiere 5 ciclos de reloj. Entonces una vez, a procesado, el dato es enviado a traves del bus, para alojarlo en la memoria ram. Pero una cosa es qué tan rápido se realizen esos ciclos de reloj y otra es qué tan rápido son enviados a la memoria.
La velocidad con que trabajan (medida en hertzios): existen dos tipo de velocidades de los micros hoy en día, velocidad interna la velocidad a la que funciona el micro internamente (200, 333, 450... MHz); y velocidad externa o del bus o también "velocidad del FSB"; la velocidad a la que se comunican el micro y la placa base, para poder abaratar el preciode ésta. Típicamente, 33, 60, 66, 100 ó 133 MHz.
LA VELOCIDAD DELRELOJ: Se refiere a la velocidad del microprocesador. Por ejemplo, para procesar una instrucción, por decir algo, una multiplicación, digamos que ese microprocesador requiere 5 ciclos de reloj. Entonces una vez, a procesado, el dato es enviado a traves del bus, para alojarlo en la memoria ram. Pero una cosa es qué tan rápido se realizen esos ciclos de reloj y otra es qué tan rápido son enviados a la memoria.
La velocidad con que trabajan (medida en hertzios): existen dos tipo de velocidades de los micros hoy en día, velocidad interna la velocidad a la que funciona el micro internamente (200, 333, 450... MHz); y velocidad externa o del bus o también "velocidad del FSB"; la velocidad a la que se comunican el micro y la placa base, para poder abaratar el preciode ésta. Típicamente, 33, 60, 66, 100 ó 133 MHz.
ENCAPSULADO DE UN MICROPROCESADOR
La comunicación de un microprocesador con el exterior, esto es, con la memoria principal y con las unidades de control de los periféricos, se realiza mediante señales de información y señales de control que son enviadas a través del patillaje del microprocesador. Posteriormente, estas señales viajarán por el bus del sistema que comunica al procesador con los demás componentes situados en la placa base, pasando a continuación al bus de E/S hasta llegar al periférico correspondiente. El número y tamaño de las patillas ha ido variando con el tiempo según las necesidades y las tecnologías utilizadas. Para comunicarse con el resto del sistema informático el procesador utiliza las líneas de comunicación a través de sus patillas (pines). Se define como encapsulado la forma en que se empaqueta la oblea de silicio para efectuar su conexión con el sistema.
Encapsulados más importantes:
DIP (Dual in-line package).

DIP, o Dual in-line package por sus siglas en inglés, es una forma de encapsulamiento común en la construcción de circuitos integrados. La forma consiste en un bloque con dos hileras paralelas de pines, la cantidad de éstos depende de cada circuito. Por la posición y espaciamiento entre pines, los circuitos DIP son especialmente prácticos para construir prototipos en tablillas de protoboard. Concretamente, la separación estándar entre dos pines o terminales es de 0.1“ (2.54 mm). La nomenclatura normal para designarlos es DIPn, donde n es el número de pines totales del circuito. Por ejemplo, un circuito integrado DIP16 tiene 16 pines, con 8 en cada fila.
PGA (Pin grid array).

DIP, o Dual in-line package por sus siglas en inglés, es una forma de encapsulamiento común en la construcción de circuitos integrados. La forma consiste en un bloque con dos hileras paralelas de pines, la cantidad de éstos depende de cada circuito. Por la posición y espaciamiento entre pines, los circuitos DIP son especialmente prácticos para construir prototipos en tablillas de protoboard. Concretamente, la separación estándar entre dos pines o terminales es de 0.1“ (2.54 mm). La nomenclatura normal para designarlos es DIPn, donde n es el número de pines totales del circuito. Por ejemplo, un circuito integrado DIP16 tiene 16 pines, con 8 en cada fila.
PGA (Pin grid array).
.jpg) El pin grid array o PGA es un tipo de empaquetado usado para los circuitos integrados, particularmente microprocesadores. Originalmente el PGA, el zócalo clásico para la inserción en una placa base de un microprocesador, fue usado para procesadores como el Intel 80386 y el Intel 80486; consiste en un cuadrado de conectores en forma de agujero donde se insertan los pines del chip por medio de presión. Según el chip, tiene más o menos agujeros (uno por cada patilla).
El pin grid array o PGA es un tipo de empaquetado usado para los circuitos integrados, particularmente microprocesadores. Originalmente el PGA, el zócalo clásico para la inserción en una placa base de un microprocesador, fue usado para procesadores como el Intel 80386 y el Intel 80486; consiste en un cuadrado de conectores en forma de agujero donde se insertan los pines del chip por medio de presión. Según el chip, tiene más o menos agujeros (uno por cada patilla).QFP (Quad Flat Package).
 Un encapsulado Quad Flat Package (QFP o encapsulado cuadrado plano) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. QFP utiliza habitualmente de 44 a 200 pines, con una separación entre ellos de 0,4 a 1 mm. Esto es una mejora respecto del encapsulado Small-Outline Integrated Circuit (SOP o SOIC) pues permite una mayor densidad de pines y utiliza las cuatro caras del chip (en lugar de solo dos). Para un número de pines mayor se utiliza la técnica Ball grid array (BGA) que permite usar toda la superficie inferior.
Un encapsulado Quad Flat Package (QFP o encapsulado cuadrado plano) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. QFP utiliza habitualmente de 44 a 200 pines, con una separación entre ellos de 0,4 a 1 mm. Esto es una mejora respecto del encapsulado Small-Outline Integrated Circuit (SOP o SOIC) pues permite una mayor densidad de pines y utiliza las cuatro caras del chip (en lugar de solo dos). Para un número de pines mayor se utiliza la técnica Ball grid array (BGA) que permite usar toda la superficie inferior.LQFP (Low-profile Quad Flat Package).
 Un encapsulado Low-profile Quad Flat Package (LQFP o encapsulado cuadrado plano de perfil bajo) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. El espacio entre pines puede variar; los intervalos más comunes son 0.4, 0.5, 0.65 y 0.80 mm.
Un encapsulado Low-profile Quad Flat Package (LQFP o encapsulado cuadrado plano de perfil bajo) es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía. El espacio entre pines puede variar; los intervalos más comunes son 0.4, 0.5, 0.65 y 0.80 mm.PLCC (Plastic Leaded Chip Carrier).
 Un Plastic Leaded Chip Carrier (PLCC), también llamado Quad-Flat-J-Leg Chipcarrier (QFJ) es un encapsulado de circuito integrado con un espaciado de pines de 1,27 mm (0,05 pulgadas). El número de pines oscila entre 20 y 84. Los encapsulados PLCC pueden ser cuadrados o rectangulares. El ancho oscila entre 0,35 y 1,15 pulgadas. PLCC es un estándar JEDEC. Las configuraciones PLCC requieren menos espacio en placa que sus competidores los leadless chip carrier (similares a los encapsulados DIP pero con bolitas en lugar de pines en cada conector).
Un Plastic Leaded Chip Carrier (PLCC), también llamado Quad-Flat-J-Leg Chipcarrier (QFJ) es un encapsulado de circuito integrado con un espaciado de pines de 1,27 mm (0,05 pulgadas). El número de pines oscila entre 20 y 84. Los encapsulados PLCC pueden ser cuadrados o rectangulares. El ancho oscila entre 0,35 y 1,15 pulgadas. PLCC es un estándar JEDEC. Las configuraciones PLCC requieren menos espacio en placa que sus competidores los leadless chip carrier (similares a los encapsulados DIP pero con bolitas en lugar de pines en cada conector). VENTILACION MICROPROCESADOR
Básicamente son dos maneras de ventilar el procesador:
1.- Consiste en que el ventilador dirija el aire directamente al disipador del procesador, esto siempre y cuándo el gabinete cuente con un cono de ventilación ó una ventila lateral.
2.- Se trata de que el ventilador expulse el aire del disipador, esto cuándo se carezca de ventilación lateral.
Otras maneras que se utilizan también es por medio de Software especializado y por medios basados en agua.
La arquitectura de un microprocesador o de cualquier procesador se define por el conjunto de instrucciones que puede obedecer, las maneras en que las instrucciones pueden especificar la localización de los datos por procesar.
Las instrucciones que obedece un microprocesador están codificadas como digitos binarios en un sistema de memoria, cada instrucción se divide en uno o mas campos, todas las instrucciones tienen un campo de codigo de operación que define el propósito de intrucción como sumar o mover datos.
Las instrucciones que obedece un microprocesador están codificadas como digitos binarios en un sistema de memoria, cada instrucción se divide en uno o mas campos, todas las instrucciones tienen un campo de codigo de operación que define el propósito de intrucción como sumar o mover datos.
No hay comentarios:
Publicar un comentario